樣品申請 | 資料下載 | 替換型號咨詢
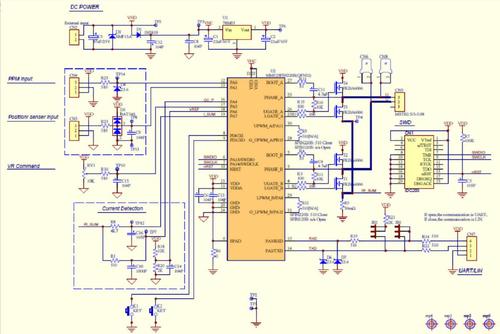
電源專用芯片MM32SPIN電機有刷電機驅動應用方案—機器人舵機1、簡介 本文簡單介紹基于32位MCU MM32SPIN電機/電源專用芯片有刷驅動技術于"舵機軌跡控制"的應用實例。 方案特色: ARM Cortex-M0高性能電機驅動專用芯片 內建兩組N型Gate Driver 速度命令輸入可為模擬電壓或PWM信號 ADC 采樣位置回授 2、有刷舵機技術原理 在此介紹有刷舵機軌跡移動實現方法. 有刷舵機內部分為三大區塊 控制板 有刷馬達 位置回授傳感器 定義: LSB : 12 bits ADC 采樣單位 a :加速度單位: (LSB÷(ms^2)) t :時間單位:(ms) SP : 速度單位:(LSB÷ms) P1:結束位置單位:LSB P0 :起始位置單位:LSB T1 :結束時間單位:ms(毫秒) T0 :起始時間單位:ms(毫秒) V1 :(P1-P0) ÷(T1-T0) 單位::(LSB÷ms) V0 : 初始速度單位: (LSB÷ms) X :距離單位::(LSB) Th :(T1-T0)÷2單位:(ms) V2 : 速度軌跡最高速單位:(LSB÷ms) 硬件設計
MM32SPIN電機/電源專用芯片,具有內建兩相Gate Driver,相當適合有刷電機應用,更大大地簡化了電機驅動板的設計,內建除法器更可快速反應軌跡控制算法,提高了軟件效率,同時帶來開發成本降低的好處.最新的產品信息,請洽靈動微代理商英尚微電子. |